 oit.ac.jp
oit.ac.jp日常生活支援ロボットの研究・開発
鬼ごっこをするロボットの開発(子どもと遊ぶ生活支援ロボット)
鬼ごっ こを実現するためには,何を実現できればよいでしょうか?例えば,ロボットが鬼役とすればプレイヤの人を追ってタッチすればよいですね.これは人同士であれば ほぼ意識しないで行えることだと思います.しかし,ロボットで実現しようとすると難しい.本研究室は,Laser Range Finder (LRF)を用いて,人の位置を計測する技術を有しています.この技術を用いてプレイヤを追従します.しかし,ただ単に追従すればよいだけではないのがこ の研究の難しさと面白さです.また,本研究で得た知見は警備ロボット等に応用可能であると考えています.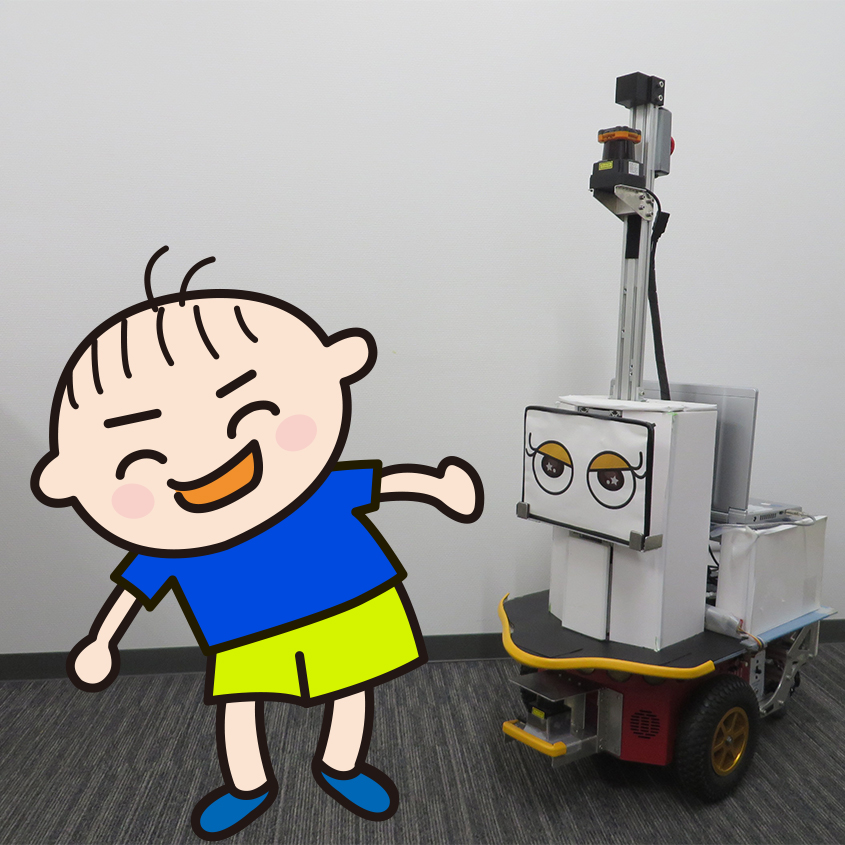
- Sora Kitamoto, Yutaka Hiroi, Kenzaburo Miyawaki, and Akinori Ito, " Robust Human Tracking Using a 3D LiDAR and Point Cloud Projection for Human-Following Robots , "Sensors 2025, 25(6), 1754; https://doi.org/10.3390/s25061754
- Yo Tamagawa, Yutaka Hiroi, Kenzaburo Miyawaki, and Akinori, , "An LRF-Based Obstacle Avoidance Method for Various Robot Sizes," Proc. of The 2025 9th International Conference on Robotics and Automation Sciences: AI-Powered Robotics Advancements (ICRAS 2025) , pp. 41- 47, 2025.
- Yutaka Hiroi, and Akinori Ito, "Development of a Play-Tag Robot with Human–Robot Contact, "Applied Sciences 2023, 13(23), 12909; https://doi.org/10.3390/app132312909
- Yoshitaka Kasai, Yutaka Hiroi, Kenzaburo Miyawaki, and Akinori Ito, "Development of a Mobile Robot That Plays Tag with Touch-and-Away Behavior Using a Laser Range Finder, "Applied Sciences 2021, 11(16), 7522; https://doi.org/10.3390/app11167522
- 玉川陽, 廣井富, 宮脇健三郎, 伊藤 彰則, "鬼ごっこにおける鬼から逃げるロボットの経路計画の提案", 第43回日本ロボット学会学術講演論文集, 2H1-05, 2025.
- 北本宙, 廣 井富, 宮脇健三郎, 伊藤 彰則,人追従ロボットのための3DLiDAR点群押しつぶし手法の押しつぶし範囲の検討,第25回計測自動制御学会システムインテグレーション部門(SI2024)講演論文 集,1B5-03, pp. 393-396, 2024.(優秀講演賞)
- 中尾風駿, 廣 井富, 宮脇健三郎, 伊藤 彰則,鬼ごっこロボットのための展開収納可能な折りたたみ式アームの開発,第25回計測自動制御学会システムインテグレーション部門(SI2024)講演論文 集 ,1B5-06, p.407, 2024.
- 北本宙, 廣井富, 北本宙, 廣 井富, 宮脇健三郎, 伊藤 彰則,人追従ロボットのための3DLiDAR点群押しつぶし手法の押しつぶし範囲の検討,第25回計測自動制御学会システムインテグレーション部門 (SI2024)講演論文 集,1B5-03, pp. 393-396, 2024健三郎, 伊藤 彰則,人追従ロボットへの3DLiDARの点群押しつぶし手法の実装,第24回計測自動制御学会システムインテグレーション部門(SI2023)講演論文 集, 3G2-04, p. 3764, 2023.
- 佐藤尚昭, 廣井富, 北本宙, 宮脇健三郎,伊藤彰則, "鬼ごっこロボットのための複数のリュック型タッチデバイスの識別手法の提案", ロボティクス・メカトロニクス講演会2023 講演論文集, 1P1-F09,2023.
- 可西慶宇, 廣井富, 宮脇健三郎, 伊藤 彰則,鬼ごっこロボットのための1 自由度アームを用いたタッチ動作の検討,第23回計測自動制御学会システムインテグレーション部門(SI2022)講演論文集, 3A2-B17, p. 2031, 2022.
- 星村駿, 廣井富,可西慶宇, 宮脇健三郎, 伊藤彰則, "鬼ごっこロボットのためのリュックサック型タッチデバイスの試作-", ロボティクス・メカトロニクス講演会2022 講演論文集, 2A1-H03,2022.
- 可西慶宇, 廣井富, 若林広悦, 宮脇健三郎, 伊藤彰則,鬼ごっこロボットのための複数人への追跡手法の提案,第39回日本ロボット学会学術講演論文集, 1G1-01, 2021.
- 可西慶宇, 廣井富, 宮脇健三郎, 中田海地, 伊藤彰則, "人へのタッチを志向したロボットの人への接近手法の提案 -鬼ごっこロボットの開発-", ロボティクス・メカトロニクス講演会2021 講演論文集, 1P3-E02,2021.
[受賞]
- SI 2024 優秀講演賞:北本宙, 廣 井富, 宮脇健三郎, 伊藤 彰則,人追従ロボットのための3DLiDAR点群押しつぶし手法の押しつぶし範囲の検討
[科研費]
- 基盤研究(C),「生活支援ロボットにおける動的接触インタラクションの高度化の研究」(2025年4月1日~2028年3月31日)
- 基盤研究(C),「動的接触インタラクションが可能な子どもと遊ぶ生活支援ロボットの実現」(2020年4月1日~2023年3月31日)
「だるまさんが転んだ」を行うロボットの開発(子どもと遊ぶ生活支援ロボット)
核家族化,少子高齢化等の影響により,子供の外遊びの機会が減っています.本研究の目的は,子供と動的なインタラクションが可能な生活支援ロボット を実現することです.その中でも,「だるまさんが転んだ」に注目して研究を進めています.本研究室で開発を進めているLRFを用いた人追従技術が応用され ています.


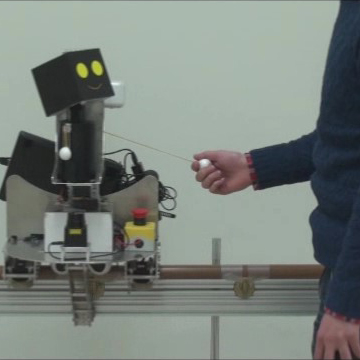
Carry PM2 だるまさんが転んだの様子

Carry PM3(ロボットアバタが振り向いて「だるまさんが転んだ」をする)下記論文に動画があります.
- Yutaka
Hiroi, and Akinori Ito, "Realization of a Robot System That Plays “Darumasan-Ga-Koronda ” Game with Humans, "Robotics 2019, 8(3), 55; https://doi.org/10.3390/robotics8030055
- Yuko Nakamori, Yutaka Hiroi, and Akinori Ito, "Multiple player detection and tracking method using a laser range finder for a robot that plays with human," ROBOMECH Journal, Volume 5, Number 1, 15 pages, 2018. https://doi.org/10.1186/s40648-018-0122-x
- 中森裕子,廣井富,田中翔吾, 伊藤彰則,「だるまさんが転んだ」の鬼役ロボットのためのタッチ機能の開発,第19回計測自動制御学会システムインテグレーション部門(SI2018)講演論文集, 3D3-03, p. 3027, 2018.
- 野阪百穂,廣井富,田中翔吾, 伊藤彰則,操作者の顔を再現するテレプレゼンスロボットの提案,第19回計測自動制御学会システムインテグレーション部門(SI2018)講演論文集, 3D3-04, p. 3028, 2018.
- 中森裕子,廣井富,伊藤彰則,デモンストレーションを指向したロボットの原点復帰の提案 -「だるまさんが転んだ」を行うロボットの開発-,第36回日本ロボット学会学術講演論文集DVD, 2H2-05, 2018.
- 廣井富,小田垣成伸,伊藤彰則,"OpenPoseを用いた人の振り返り検出手法の開発―「だるまさんが転んだ」を行うロボットの開発―",ロボティクス・メカトロニクス講演会2018 講演論文集 DVD-ROM, 1P2-G07, 2018.
- Yuko Nakamori, Yutaka Hiroi, Akinori Ito, "Enhancement of Person Detection and Tracking for a Robot that Plays with Human," Proc. of 2017 IEEE/SICE International Symposium on System Integration, 6 pages, 2017.
- 中森裕子, 廣井富, 伊藤彰則, LRF を用いた「だるまさんが転んだ」における「幅判定手法」の効果, ロボティクス・メカトロニクス講演会2017 講演論文集 DVD-ROM, 1P2-L06, 2017.
- 中森裕子, 廣井富, LRFを用いた「だるまさんが転んだ」における人追従安定化に関する基礎的検討, 日本機械学会関西学生会学生員卒業研究発表講演会,16- p.21, 2017.
- 廣井富, 中森裕子, 森下康平, 伊藤彰則, 子どもと外遊びを行うテレプレゼンスロボットの提案, 第17回システムインテグレーション部門講演会(SI2016)講演論文集, pp. 1578-1579, 2016.
- Keisuke Sakai, Yutaka Hiroi, Akinori Ito, "Playing with a Robot: Realization of "Red Light, Green Light" using a Laser Range Finder", Proc. of 2015 Third International Conference on Robot, Vision and Signal Processing, pp. 1-4, 2015. (Best Paper Award)
- 廣井富, 坂井奎亮, 立田裕記, 伊藤彰則, ロボットとの「だるまさんがころんだ」の提案, ロボティクス・メカトロニクス講演会2015 講演論文集 DVD-ROM, 2A2-H05, 2015.
- 坂井奎亮, 廣井富, 二上啓大, 藤原祐磨, 伊藤彰則,人追従と移動軌跡の記憶が可能な台車「Carry PM2」の開発, 第15回計測自動制御学会システムインテグレーション部門講演会(SI2014)講演論文集,pp. 2158-2159,2014.
[メディア]
- 相席食堂 朝日放送テレビで「だるまさんが転んだを行うロボット」が 紹介されました.(2019年3月24日)
- ロンブー淳の居座り。:毎日放送で 「だ るまさんが転んだ」を行うロボットが紹介されました.(2017年6月2日)
- め ざましテレビ:フジテレビでJapan Robot Week 2016 に出展した「ロボットによる子どもの外遊びおよび子育て支援」が紹介されました.(2016年10月27日)
[科研費]
- 基盤研究(C),「子供との動的インタラクションが可能なロボットの実現」(2016年4月1日~2019年3月31日
道案内をするロボットの開発(手すりを移動するコミュニケーションロボットの開発)
病院や福祉・介護施設等で道案内・警備・リハビリ等を行うことが可能な手すりの上を移動可能なコミュニケーションロボットの開発を行っています.ここにも,本研究で開発した人追従技術が用いられています.

イメージ

初代手すり移動ロボット 弐代目手すり移動ロボット
手が伸びてその人のペースで道案内が可能です!
- Hironobu Wakabayashi, Yutaka Hiroi, Kenzaburo Miyawaki, and Akinori Ito, " Development of a Personal Guide Robot That Leads a Guest Hand-in-Hand While Keeping a Distance, "Sensors 2024, 24(7), 2345; https://doi.org/10.3390/s24072345
- Hironobu Wakabayashi, Yutaka Hiroi, Kenzaburo Miyawaki, and Akinori, "Path following algorithm with small error for guide robot,"Robot Intelligence Technology and Applications 7. RiTA 2022. Lecture Notes in Networks and Systems, vol 642. Springer, Cham. https://doi.org/10.1007/978-3-031-26889-2_6, 2023.
- 玉川陽, 廣井富, 宮脇健三郎, 伊藤 彰則, "道案内ロボットのためのLRFを用いた障害物回避手法の提案", ロボティクス・メカトロニクス講演会2025 講演論文集, 1P1-Q08,2025.
- 角田蓮, 廣 井富, 宮脇健三郎, 伊藤 彰則,道案内ロボットのための2個のLRFを用いた人検出手法の開発,第25回計測自動制御学会システムインテグレーション部門(SI2024)講演論文 集 ,1B5-04, pp.397-400, 2024.
- 玉川陽, 廣 井富, 宮脇健三郎, 伊藤 彰則,LRFを用いた障害物回避における多様なロボット形状への対応手法,第25回計測自動制御学会システムインテグレーション部門(SI2024)講演論文 集 ,1B5-05, pp.401-406, 2024.
- 角田蓮, 廣井富, 宮脇健三郎, 伊藤 彰則,ロボットによる道案内のための全方向移動ロボットの開発,第24回計測自動制御学会システムインテグレーション部門(SI2023)講演論文集, 3G2-03, p. 3763, 2023.(優秀講演賞)
- 若林広悦, 廣井富, 宮脇健三郎, 伊藤 彰則,人の手を引きながら先導する道案内ロボットへの間合い制御の実装,第24回計測自動制御学会システムインテグレーション部門(SI2023)講演論文集, 3G2-06, p. 3766, 2023.(優秀講演賞)
- 若林広悦, 廣井富, 宮脇健三郎, 伊藤 彰則, "距離誤差の少ない経路追従手法を実装した道案内ロボットの運用に向けた取り組み", 第40回日本ロボット学会学術講演論文集, 4D1-03, 2022.
- 若林広悦, 廣井富, 宮脇健三郎, 伊藤 彰則, "道案内ロボットのための距離誤差の少ない経路追従手法の開発", ロボティクス・メカトロニクス講演会2022 講演論文集, 2A1-H02,2022.
- 若林広悦, 廣井富, 宮脇健三郎, 伊藤 彰則,道案内ロボットのための距離誤差の少ない経路追従手法の提案,第22回計測自動制御学会システムインテグレーション部門(SI2021)講演論文集, 1G1-03, pp. 825-830, 2021(優秀講演賞)
- 田中佑季,廣井富,伊藤彰則,複数台の道案内ロボットのための人位置情報の引き継ぎ手法の提案,第34回日本ロボット学会学術講演論文集DVD, 3G1-07, 2016.
- 田中佑季,廣井富,伊藤彰則,複数台の手すりを移動する道案内ロボットによる人位置情報の引き継ぎ手法の実装,第18回日
本感性工学会大会予稿集, F22, 2016. - Yuma Fujiwara, Yutaka Hiroi, Yuki Tanaka and Akinori Ito, “Development of a Mobile Robot Moving on a Handrail ―Control for Preceding a Person Keeping a Distance―”, Proc. of the 24th IEEE International Symposium on Robot and Human Interactive Communication, RO-MAN 2015, pp. 413-418, 2015.
- 田中佑季, 廣井富, 藤原祐磨, 伊藤彰則, 人の少し前を移動するコミュニケーションロボットの評価-手すり上を移動するコミュニケーションロボットの開発-, ロボティクス・メカトロニクス講演会2015 講演論文集 DVD-ROM, 2A2-H06, 2015.
- 田中佑季, 廣井富, 人の少し前を移動するコミュニケーションロボットの提案,日本機械学会関西学生会学生員卒業研究発表講演会, no. 17, p. 10, 2015. (Best Presentation Awards)
- 藤原祐磨, 廣井富, 鈴木直人, 伊藤彰則, 手すり上を移動するコミュニケーションロボットの開発―伸びる手を用いた道案内の評価―, 第32回日本ロボット学会学術講演論文集DVD, 3P2-04, 2014年.
- 藤原祐磨, 廣井冨, 川崎成人, 黒田尚孝, 鈴木直人, 伊藤彰則, 手すり上を移動するコミュニケーションロボットの開発―伸びる手を用いた道案内の提案―, ロボティクス・メカトロニクス講演会 2014 講演論文集DVD-ROM,2A1-F06,2014年.
- 廣井富, 黒田尚孝, 藤原祐磨, 戸塚典子, 伊藤彰則, 手すりを移動するコミュニケーションロボット―道案内方法の比較―, 第31回日本ロボット学会学術講演論文集DVD, 1G3-02, 2013年.
- 廣井富, 内田裕二, 西村駿宏. 中山貴之, 黒田尚孝, 三宅真司, 戸塚典子, 伊藤彰則, 手すりを移動するコミュニケーションロボット―全体コンセプト―, ヒューマンインタフェースシンポジウム2012論文集, 1223S, pp. 101-102, 2012.
- SI 2023 優秀講演賞:角田蓮, 廣井富, 宮脇健三郎, 伊藤 彰則,ロボットによる道案内のための全方向移動ロボットの開発
- SI 2023 優秀講演賞:若林広悦, 廣井富, 宮脇健三郎, 伊藤 彰則,人の手を引きながら先導する道案内ロボットへの間合い制御の実装
- SI 2021 優秀講演賞: 若林広悦, 廣井富, 宮脇健三郎, 伊藤 彰則,道案内ロボットのための距離誤差の少ない経路追従手法の提案
- フジテレビ み んなのニュースで「手すりの上を移動する道案内ロボット」が放送されました.(2015年12月3日(木))
コロナ禍を考慮した遠隔からの学習支援ロボットの開発
コロナ禍において大学の多くの授業がオンラインになりました.しかし実験・実習など作業と直接の指示を必要とする授業は座学とは異なる工夫が必要です.そこで遠隔から指導ができるロボットの開発を目指しています.
企業様との共同開発を希望しています!
【本件に関する連絡先】
大阪工業大学 研究支援・社会連携センター
E-mail:OIT.Kenkyu@josho.ac.jp
TEL:06-6954-4140
FAX:06-6954-4066
URL:https://www.oit.ac.jp/japanese/sangaku/index.html
特許名称:対話支援装置及び対話装置
出願人:国立大学法人東北大学, 学校法人常翔学園
発明者:伊藤彰則, 廣井富
出願番号:特願2017-037648
登録番号:特許第7045020号

- Rikuto Suzuki, Yutaka Hiroi, and Akinori Ito, "A Drawing Check Helper for Technical Drawing Remote Teaching Robot," Proc. of The 8th International Conference on Advanced Mechatronics (ICAM2024) , pp. 36-37, 2024.
- Yutaka Hiroi, and Akinori Ito, "A Robotic System for Remote Teaching of Technical Drawing, "Education Sciences 2023, 13(4), 347; https://doi.org/10.3390/educsci13040347
- 硲紅太,廣 井富, 鈴木陸人, 伊藤 彰則,遠隔からの回転台を有した2自由度レーザポインタ指示型学習支援ロボットの開発,ロボティクス・メカトロニクス講演会2024 講演論文集, 1P2-H02,2024.
- 鈴木陸人, 廣井富, 伊藤 彰則,液晶タブレットへのペン描画によるペンプロッタ型学習支援ロボットの実現に向けて,第24回計測自動制御学会システムインテグレーション部門(SI2023)講演論文集, 3G2-02, p. 3762, 2023.
- 廣井富, 大継翔汰, 伊藤 彰則,コロナ禍における離れた場所からのペンプロッタ型学習支援ロボットの開発,第23回計測自動制御学会システムインテグレーション部門(SI2022)講演論文集, 3A2-B15, p. 2029, 2022.
- 廣井富, 横山大輔, 伊藤 彰則,コロナ禍における離れた場所からのペンプロッタ型学習支援ロボットの開発,第23回計測自動制御学会システムインテグレーション部門(SI2022)講演論文集, 3A2-B16, p. 2030, 2022.
- 廣井富, 瓜田竜一, 玉木一生, 若林広悦, 宮脇健三郎, 伊藤彰則,コロナ禍における離れた場所からの学習支援ロボットの開発,第39回日本ロボット学会学術講演論文集, 1C1-02, 2021.
- 廣井富, 「遠隔からの学習支援ロボットの開発とコロナ禍の活用」イ ノベーション・ジャパン2021~大学見本市Online(2021年8月23日(月) ~9月17日(金)
[受賞]
- SI 2022 優秀講演賞:廣井富, 横山大輔, 伊藤 彰則,コロナ禍における離れた場所からのペンプロッタ型学習支援ロボットの開発
日常生活支援ロボットASAHI
日常生活支援ロボットASAHIシリーズの開発を行っています.元々ASAHIは,ロボカップ@ホーム(競 技会)のために開発したロボットです.ロボカップ@ホームリーグは,生活支援ロボットが持つべき技術がルールの中に盛り込まれており,それに対応する形で ASAHIも進化してきました.しかし,単なるロボカップ用のロボットではなく,例えば車いすの方と何が困っているか対話した際に「床に落とし た携帯電話が自分だけで取れないので,なんとかならないか」という話しがありました.それに対応するために床面のものを拾い上げことができるようにアームを 上下する機構を思いつきました.今では多くの生活支援ロボットが上下に動作する機構を採用しています.
ASAHIには,「ロボットアバタ」が搭載されています.これは,親和性を向上させる目的があります.例えば,ユーザと対話しやすい高さ,大きさであり,指差しにより曖昧な対話内容を明確にします.
参考動画:別サイトに飛びます(ロボカップ@ホームリーグプロジェクト)

ロボカップの成績 → こちらから
- Hironobu Wakabayashi, Yutaka Hiroi, Kenzaburo Miyawaki, and Akinori Ito, " Development of a Personal Guide Robot That Leads a Guest Hand-in-Hand While Keeping a Distance, "Sensors 2024, 24(7), 2345; https://doi.org/10.3390/s24072345
- Hironobu Wakabayashi, Yutaka Hiroi, Kenzaburo Miyawaki, and Akinori, "Path following algorithm with small error for guide robot,"Robot Intelligence Technology and Applications 7. RiTA 2022. Lecture Notes in Networks and Systems, vol 642. Springer, Cham. https://doi.org/10.1007/978-3-031-26889-2_6, 2023.
- Yutaka Hiroi, and Akinori Ito, "A Pedestrian Avoidance Method Considering Personal Space for a Guide Robot, "Robotics 2019, 8(4), 97; https://doi.org/10.3390/robotics8040097
- Kohei Morishita, Yutaka Hiroi, and Akinori Ito, "A Crowd Avoidance Method Using Circular Avoidance Path for Robust Person Following," Journal of Robotics, vol. 2017, 10 pages, 2017. doi:10.1155/2017/3148202
- Yutaka Hiroi, and Akinori Ito, "Influence of the Height of a Robot on Comfortableness of Verbal Interaction," IAENG International Journal of Computer Science, vol. 43, no.4, pp.447-455, 2016.
- 玉川陽, 廣 井富, 宮脇健三郎, 伊藤 彰則,LRFを用いた障害物回避における多様なロボット形状への対応手法,第25回計測自動制御学会システムインテグレーション部門(SI2024)講演論文 集 ,1B5-05, pp.401-406, 2024.
- 廣井富, 伊藤彰則,
- 廣井富, 伊藤彰則,
拡張現実感を用いたロボットデザインの評価,
日本バーチャルリアリティ学会論文誌, Vol. 18, No. 2, pp.161-170,2013. - Yutaka Hiroi, Shohei Matsunaka and Akinori Ito, A Mobile Robot System With Semi-Autonomous Navigation Using Simple And Robust Person Following Behavior, Journal of Man, Machine and Technology, Vol. 1, No. 1, pp. 44- 62, 2012.
- Yutaka Hiroi, Akinori Ito and Eiji Nakano,
EVALUATION OF ROBOT-AVATAR-BASED USER-FAMILIARITY IMPROVEMENT FOR ELDERLY PEOPLE, KANSEI Engineering International, vol. 8, no.1, pp.59-66, 2009. - 廣井富, 伊藤彰則, 中野栄二,
人間共存型ロボットのためのロボットアバタを用いた親しみ感の向上,
感性工学研究論文集第7巻4号(感性ロボティクス特集),pp.797-805,2008.
- Misaki Yuki, Yutaka Hiroi, Akinori Ito, "Light-Weight Hand-Waving Gesture Recognition Method Using Kinect V2 and Frequency Analysis," Proc. of 2021 IEEE/SICE International Symposium on System Integration, 6 pages, 2021.
- Keisuke Sakai, Yutaka Hiroi, and Akinori Ito, “Teaching a Robot where Objects are: Specification of object location using human following and human orientation estimation”, Proc. of 14th International Symposium on Robotics and Applications, World Automation Congress 2014, 6 pages, 2014.
- Yutaka Hiroi and Akinori Ito, “ASAHI: OK for Failure -A Robot for Supporting Daily Life, Equipped with a Robot Avatar-”, Proc. of 8th ACM/IEEE International Conference on Human-Robot Interaction, pp.141-142, 2013.
- Yutaka Hiroi, Takayuki NAKAYAMA, Hisanori KURODA, Shinji MIYAKE and Akinori Ito,“Effect of Robot Height on Comfortableness of Spoken Dialog”, Proc. of 5th International Conference on Human System Interaction, 6 pages, 2012.
- Yutaka Hiroi, Shuhei Hisano and Akinori Ito, “EVALUATION OF HEAD SIZE OF AN INTERACTIVE ROBOT USING AN AUGMENTED REALITY”, Proc. of 13th International Symposium on Robotics and Applications, World Automation Congress 2010, (CDROM), 2010.
- Yutaka Hiroi, Eiji Nakano, Takayuki Takahashi, Akinori Ito, Koji Kotani and Nobuo Takatsu,"A New Design Concept of Robotic Interface for the Improvement of User Familiarity", Proc. SPIE, vol.6042, no.604230, pp.1-4 , 2005.
- 御崎雄貴,廣井富,伊藤彰則,Kinect による低演算量な腕振り動作の検出法とその評価,第21回計測自動制御学会システムインテグレーション部門(SI2020)講演論文集, 3E2-01, pp. 2722-2727, 2020.
- 廣井富, 朝倉大裕, 中田海地, 伊藤彰則, "人と並んだ状態で人追従可能なロボットに関する基礎的検討", ロボティクス・メカトロニクス講演会2020 講演論文集, 1A1-F02,2020.
- 中田海地,朝倉 大裕, 廣井富,伊藤彰則,人追従時における追従対象者と非追従対象者の切り分け手法の実装,第20回計測自動制御学会システムインテグレーション部門(SI2019)講演論文集, 3B3-13, pp. 2368-2371, 2019.
- 中田海地,廣井富,伊藤彰則,"人追従時における追従対象者と非追従対象者の切り分けに関する基礎的検討",ロボティクス・メカトロニクス講演会2019 講演論文集 DVD-ROM, 1P1-L01,2019.
- 野阪百穂,廣井富,伊藤彰則,"テレプレゼンスロボットのための操作者の顔提示機能の開発",ロボティクス・メカトロニクス講演会2019 講演論文集 DVD-ROM, 1P1-L02,2019.
- 宮内雄大,廣井富,伊藤彰則,RGB-DカメラとLaser Range Finderを用いた障害物回避に関する基礎的検討,第19回計測自動制御学会システムインテグレーション部門(SI2018)講演論文集, 3A1-04, p. 2182, 2018.
- 野阪百穂,廣井富,田中翔吾, 伊藤彰則,操作者の顔を再現するテレプレゼンスロボットの提案,第19回計測自動制御学会システムインテグレーション部門(SI2018)講演論文集, 3D3-04, p. 3028, 2018.
- 廣井富,宮内雄大,伊藤彰則,正面から接近する歩行者に対するロボットの事前回避手法の開発,ロボティクス・メカトロニクス講演会2018 講演論文集 DVD-ROM, 1P2-G08, 2018.
- 津田剛志,廣井富,伊藤彰則,RGB-Dセンサを用いた指差し認識に関する研究-位置誤差に関する一考察-,第34回日本ロボット学会学術講演論文集DVD, 3G1-05, 2016.
- 坂井奎亮, 廣井富, 伊藤彰則 , LRFによる人追従を考慮した障害物回避手法の提案,第32回日本ロボット学会学術講演論文集DVD, 2D2-06, 2014.
- 廣井富, 坂井奎亮, 二上啓大, 藤原祐磨, 伊藤彰則, 日常生活支援移動ロボットASAHI2013の開発, ロボティクス・メカトロニクス講演会 2014 講演論文集DVD-ROM,2A1-F05,2014年.
- 二上啓大, 廣井富, 黒田尚孝, 鈴木直人, 伊藤彰則, 指差しと音声対話併用による床面上の物体回収手法の提案, ロボティクス・メカトロニクス講演会 2014 講演論文集DVD-ROM,2A1-F07,2014年.
- 坂井 奎亮, 廣井富, 伊藤彰則, LRFを用いた人追従時の移動軌跡の記録と軌道追従に関する基礎的検討, ロボティクス・メカトロニクス講演会 2014 講演論文集DVD-ROM,2A1-F08,2014.
- 坂井奎亮, 廣井富, LRFを用いた人追従と移動軌跡の記録の両立に関する基礎的検討, 日本機械学会関西学生会学生員卒業研究発表講演会,no.17, p.15, 2014年3月17日
- 黒田尚孝, 廣井富, 伊藤彰則,ロボットアバタを用いた指差し行為の移動ロボットへの実装―人間による指差し認識の調査―,第31回日本ロボット学会学術講演論文集DVD, 1I1-01, 2013年.
- 黒田尚孝, 廣井富, 三宅真司, 伊藤彰則,ロボットアバタを用いた指差し行為の移動ロボットへの実装,第30回日本ロボット学会学術講演論文集DVD, 1H2-3, 2012年.
- 中山貴之, 廣井富, 黒田尚孝, 三宅真司, 伊藤彰則, ロボットの動作によって人間の発話開始時間を制御できるか?, 情報処理学会研究報告, vol. 2012-SLP-92, no. 5, 6 pages, 2012.
- 廣井富, 黒田尚孝, 内藤圭祐, 髙田晶太, 松井一馬, 井上駿, 林和孝, 中山貴之, 松中翔平, 伊藤彰則, 日常生活支援移動ロボットASAHI の開発-全体構想とハードウェア構成-, ロボティクス・メカトロニクス講演会 2012 講演論文集DVD-ROM,2A1-P03,2012.
- 黒田尚孝, 廣井富, 松井一馬, 三宅真司, 伊藤彰則, ロボットアバタを用いた指差し行為の実現-基本コンセプトと予備実験-, ロボティクス・メカトロニクス講演会 2012 講演論文集DVD-ROM,2A1-P04,2012.
- 黒田尚孝,廣井富,ロボットアバタを用いた指差し行為に関する基礎的検討,日本機械学会関西学生会学生員卒業研究発表講演会,no. 20, p. 18,2012.
- 内藤圭祐,廣井富,レーザレンジファインダを用いた人追跡の基礎的検討,日本機械学会関西学生会学生員卒業研究発表講演会,no. 20, p. 17,2012.
- 中山貴之,廣井富,黒田尚孝,三宅真司,伊藤彰則,ロボットの高さが対話のしやすさに及ぼす影響に関する予備的検討,第12回計測自動制御学会システムインテグレーション部門講演会(SI2011)講演論文集DVD,pp.193-194,2011.
[メディア]
- 人追従ロボットのデモが大阪日日新聞に取り上げられました(2018年9月21日(金)).
- キラリ☆ けいざい:サンテレビでロボカップ@ホームリーグプロジェクトの世界 大会に向けた取り組みの様子が紹介されました.(2017年7月9日)
- 本研究室の学生が「週 末応援ナビ☆あほやねん!すきやねん!:NHK」に出演しました.生放送で生 活支援ロボットASAHIの人追従デモも行いました.(2014年9月20日)
- テレビ大阪「宝くじドカーンと1200万円スペシャル」元気な大阪人の夢!コーナーで本研究室の学生たちがロボット開発に取り組む様子が放映されました(2012年5月10日).