 oit.ac.jp
oit.ac.jpロボットアバタを用いた親和性向上に関する研究
背景
IRIS(イリスと読む:日常生活支援ロ ボット)は親和性にも配慮しました.しかし,IRISの問題点として,
- 何を行っているか,または何を行おうとしているかが直観的にわかりにくい
- 物理的な機能の制限により,ジェスチャやアイコンタクトなどコミュニケーションに必要な非言語情報を扱いにくい
- 機械が剥き出しの外観であるために,親しみを感じにくい
などが生じました.
これらの問題点を総合的に解決するために従来法を用いての解決は困難でした. そこで,ロボットアバタという新たな概念を提案し,総合的にこれらの問題を解決しようとしています.
ロボットアバタ
![]() 高いレベルで人間の身の
回り
で安全に作業を行うこととコミュニケーション機能の両立は,現状では非常に困難です.これは,IRISを開発した経緯で痛感させられました.
高いレベルで人間の身の
回り
で安全に作業を行うこととコミュニケーション機能の両立は,現状では非常に困難です.これは,IRISを開発した経緯で痛感させられました.
そこで,私は考え方を変えました.そして,作業を担当する大きいロボットと,コミュニケーションを担当する小ロボットの2つを組み合わ せてロボット全体の親和性の向上(こ こがポイント)を狙うことを思いつきました.この小ロボットを私はロボットアバタと名づけています.ロボットのためのロボットのアバタです.
ロボットアバタにより実現できる機能
ロボットアバタの実装により実現できる機能には以下の項目があります.
- 状態の提示
- 動作予告
- 指差し行為
- 対話可能な状態の多様化
 ロボットは人工物です.よって,ユーザが直観的にロボットの状態を把握するのは,困難です.IRISは,ユーザの呼びかけ方向を認識し,そのユーザの元へ
向かい,対話を
開始します.まずは,この状態をユーザにわかりやすく理解させるために,ロボットアバタ(IRISに実装したロボットアバタをCHIRISと呼ぶ)にその
状態に応じた動作をさせました.
ロボットは人工物です.よって,ユーザが直観的にロボットの状態を把握するのは,困難です.IRISは,ユーザの呼びかけ方向を認識し,そのユーザの元へ
向かい,対話を
開始します.まずは,この状態をユーザにわかりやすく理解させるために,ロボットアバタ(IRISに実装したロボットアバタをCHIRISと呼ぶ)にその
状態に応じた動作をさせました.
次に,ユーザとの対話の状態について注目し,実験を行った結果明らかになったことは,
- ロボットアバタの動きによって,対話時の親しみ感が向上する
- ロボットアバタには対話の流れに応じた動きが必要
- 対話機能に良い印象を持つ者はロボットに親しみを感じやすく,対話機能に悪い印象を持つ者はロボットに親しみを感じにくい
ということでした.
 ロボットの現在の状態を知らせることだけではなく,ロボットの次の状態をユーザに示す,「ロボットアバタを
用いた動作予告」を私は提案しています.これは,「移動ロボット接近時における
恐怖感低減に関する研究」にも繋がる研究です.ロボットアバタの動作により,ロボットの次の状態を提示する手法です.
ロボットの現在の状態を知らせることだけではなく,ロボットの次の状態をユーザに示す,「ロボットアバタを
用いた動作予告」を私は提案しています.これは,「移動ロボット接近時における
恐怖感低減に関する研究」にも繋がる研究です.ロボットアバタの動作により,ロボットの次の状態を提示する手法です.
ロボットに作業を行わせる場合にロボットの後方にあるものを取ってくれと指示する状態があります. 通常はロボットが後ろを向き,その対象物でよいか確認することになります.これをロボットアバタに行わせれば, 時間の短縮,エネルギー効率がよい,また安全性も維持されます(皮肉にもロボットは動かさない方がいいわけです.)
 ロボットであれば,人間にできない(困難な)ことをしてもらいたいと思うのが世の常です.人間が作業をしている際に,話かけられると混乱しますが,ロボッ
トであれば可能です(システムの問題).ただし,ヒューマノイド型ロボットの場合は,人間と同様に「何?」と後ろを振り向いて対処するのが,自然な動作
かと思います.ロボットアバタの場合は,ロボットアバタだけが,対応すればよいので,対話可能な状態が多様化します.しかし実際には,ロボットの作業中は
人間を近づけない方が安全性の観点から無難です.よって,近づいてきた人間に,注意喚起をする使用法になると思います.
ロボットであれば,人間にできない(困難な)ことをしてもらいたいと思うのが世の常です.人間が作業をしている際に,話かけられると混乱しますが,ロボッ
トであれば可能です(システムの問題).ただし,ヒューマノイド型ロボットの場合は,人間と同様に「何?」と後ろを振り向いて対処するのが,自然な動作
かと思います.ロボットアバタの場合は,ロボットアバタだけが,対応すればよいので,対話可能な状態が多様化します.しかし実際には,ロボットの作業中は
人間を近づけない方が安全性の観点から無難です.よって,近づいてきた人間に,注意喚起をする使用法になると思います.
ロボットアバタの詳細や動画につい ては, 逐次更新する予定です.ご了承ください.
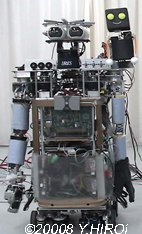
IRISに実装したロボットアバタCHIRISの写真
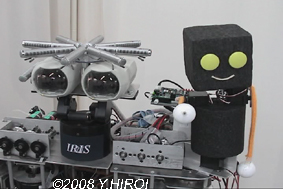
Goyane(左)とASAHI2011(右),
ASAHI2012(左), ASAHI2013(右)に実装したロボットアバタの写真




関連文献,発表など(国内学会は2009年以降のみ掲載)
[著書]
- Yutaka Hiroi and Akinori Ito, "INFLUENCE OF THE SIZE FACTOR OF A MOBILE ROBOT MOVING TOWARD A HUMAN ON SUBJECTIVE ACCEPTABLE DISTANCE," Z. Gacovski (Ed.), Mobile Robots - Current Trends, pp.177-190, INTECH., 2011.
[原著論文]
- Sora Kitamoto, Yutaka Hiroi, Kenzaburo Miyawaki, and Akinori Ito, " Robust Human Tracking Using a 3D LiDAR and Point Cloud Projection for Human-Following Robots , "Sensors 2025, 25(6), 1754; https://doi.org/10.3390/s25061754
- Hironobu Wakabayashi, Yutaka Hiroi, Kenzaburo Miyawaki, and Akinori Ito, " Development of a Personal Guide Robot That Leads a Guest Hand-in-Hand While Keeping a Distance, "Sensors 2024, 24(7), 2345; https://doi.org/10.3390/s24072345
- Yutaka Hiroi, Kenzaburo Miyawaki, and Akinori Ito, "Development of a Play-Tag Robot with Human–Robot Contact, "Applied Sciences 2023, 13(23), 12909; https://doi.org/10.3390/app132312909
- Yutaka Hiroi, and Akinori Ito, "A Robotic System for Remote Teaching of Technical Drawing, "Education Sciences 2023, 13(4), 347; https://doi.org/10.3390/educsci13040347
- Yoshitaka Kasai, Yutaka Hiroi, Kenzaburo Miyawaki, and Akinori Ito, "Development of a Mobile Robot That Plays Tag with Touch-and-Away Behavior Using a Laser Range Finder, "Applied Sciences 2021, 11(16), 7522; https://doi.org/10.3390/app11167522
- Yutaka Hiroi, and Akinori Ito, "A Pedestrian Avoidance Method Considering Personal Space for a Guide Robot, "Robotics 2019, 8(4), 97; https://doi.org/10.3390/robotics8040097
- Yutaka
Hiroi, and Akinori Ito, "Realization
of a Robot System That Plays “Darumasan-Ga-Koronda ” Game with Humans,
"Robotics 2019, 8(3),
55; https://doi.org/10.3390/robotics8030055
- Yuko Nakamori, Yutaka Hiroi, and Akinori Ito, "Multiple player detection and tracking method using a laser range finder for a robot that plays with human," ROBOMECH Journal, Volume 5, Number 1, 15 pages, 2018. https://doi.org/10.1186/s40648-018-0122-x
- Kohei Morishita, Yutaka Hiroi, and Akinori Ito, "A Crowd Avoidance Method Using Circular Avoidance Path for Robust Person Following," Journal of Robotics, vol. 2017, 10 pages, 2017. doi:10.1155/2017/3148202
- Yutaka Hiroi, and Akinori Ito, "Influence of the Height of a Robot on Comfortableness of Verbal Interaction," IAENG International Journal of Computer Science, vol. 43, no.4, pp447-455, 2016.
- 廣井富, 伊藤彰則,
- 鈴木直人, 廣井富, 千葉祐弥, 能勢隆, 伊藤彰則,
- 廣井富,
伊藤彰則,
拡張現実感を用いたロボットデザインの評価,
日本バーチャルリアリティ学会論文誌, Vol. 18, No. 2, pp.161-170,2013. - Yutaka Hiroi, Shohei Matsunaka and Akinori Ito, A Mobile Robot System With Semi-Autonomous Navigation Using Simple And Robust Person Following Behavior, Journal of Man, Machine and Technology, Vol. 1, No. 1, pp. 44- 62, 2012.
- Yutaka
Hiroi, Akinori Ito and Eiji Nakano,
EVALUATION OF ROBOT-AVATAR-BASED USER-FAMILIARITY IMPROVEMENT FOR ELDERLY PEOPLE, KANSEI Engineering International, vol. 8, no.1, pp.59-66, 2009. - 廣井富,
伊藤彰則, 中野栄二,
人間共存型ロボットのためのロボットアバタを用いた親しみ感の向上,
感性工学研究論文集第7巻4号(感性ロボティクス特集),pp.797-805,2008.
[国際会議]
- Yo Tamagawa, Yutaka Hiroi, Kenzaburo Miyawaki, and Akinori, , "An LRF-Based Obstacle Avoidance Method for Various Robot Sizes," Proc. of The 2025 9th International Conference on Robotics and Automation Sciences: AI-Powered Robotics Advancements (ICRAS 2025) , pp. 41- 47, 2025.
- Rikuto Suzuki, Yutaka Hiroi, and Akinori Ito, "A Drawing Check Helper for Technical Drawing Remote Teaching Robot," Proc. of The 8th International Conference on Advanced Mechatronics (ICAM2024) , pp. 36-37, 2024.
- Hironobu Wakabayashi, Yutaka Hiroi, Kenzaburo Miyawaki, and Akinori, "Path following algorithm with small error for guide robot,"Robot Intelligence Technology and Applications 7. RiTA 2022. Lecture Notes in Networks and Systems, vol 642. Springer, Cham. https://doi.org/10.1007/978-3-031-26889-2_6, 2023.
- Yoshitaka Kasai, Yutaka Hiroi, Kenzaburo Miyawaki, and Akinori It, "Development of a Teleoperated Play Tag Robot with Semi-Automatic Play," Proc. of 2022 IEEE/SICE International Symposium on System Integration, pp. 165-170, 2022.
- Misaki Yuki, Yutaka Hiroi, Akinori Ito, "Light-Weight Hand-Waving Gesture Recognition Method Using Kinect V2 and Frequency Analysis," Proc. of 2021 IEEE/SICE International Symposium on System Integration, 6 pages, 2021.
- Koyuki Ikemoto, Yutaka Hiroi, Akinori Ito, "Evaluation of Person Tracking Methods for Human-Robot Physical Play," Proc. of 2020 IEEE/SICE International Symposium on System Integration, 6 pages, 2020.
- Yuko Nakamori, Yutaka Hiroi, Akinori Ito, "Enhancement of Person Detection and Tracking for a Robot that Plays with Human," Proc. of 2017 IEEE/SICE International Symposium on System Integration, 6 pages, 2017.
- Keisuke Sakai, Yutaka Hiroi, Akinori Ito, "Playing with a Robot: Realization of "Red Light, Green Light" using a Laser Range Finder", Proc. of 2015 Third International Conference on Robot, Vision and Signal Processing, pp. 1-4, 2015. (Best Paper Award)
- Yuma Fujiwara, Yutaka Hiroi, Yuki Tanaka and Akinori Ito, “Development of a Mobile Robot Moving on a Handrail ―Control for Preceding a Person Keeping a Distance―”, Proc. of the 24th IEEE International Symposium on Robot and Human Interactive Communication, RO-MAN 2015, pp. 413-418, 2015.
- Keisuke Sakai, Yutaka Hiroi, and Akinori Ito, “Teaching a Robot where Objects are: Specification of object location using human following and human orientation estimation”, Proc. of 14th International Symposium on Robotics and Applications, World Automation Congress 2014, 6 pages, 2014.
- Naoto Suzuki,Takashi Nose, Yutaka Hiroi, Akinori Ito, "Controlling Switching Pause Using an AR Agent for Interactive CALL System”, HCI International 2014-Posters'Extended Abstracts Communications in Computer and Information Science, Vol. 435, pp. 588-593, 2014.
- Yutaka Hiroi and Akinori Ito, “ASAHI: OK for Failure -A Robot for Supporting Daily Life, Equipped with a Robot Avatar-”, Proc. of 8th ACM/IEEE International Conference on Human-Robot Interaction, pp.141-142, 2013.
- Yutaka Hiroi, Takayuki NAKAYAMA, Hisanori KURODA, Shinji MIYAKE and Akinori Ito,“Effect of Robot Height on Comfortableness of Spoken Dialog”, Proc. of 5th International Conference on Human System Interaction, 6 pages, 2012.
- Yutaka Hiroi and Akinori Ito, "Toward Human-Robot Interaction Design through Human-Human Interaction Experiment", D. Yang (Ed.), Informatics in Control, Automation and Robotics, Volume 2, LNEE 133, pp. 127-130, 2011.
- Yutaka Hiroi, Shuhei Hisano and Akinori Ito, “EVALUATION OF HEAD SIZE OF AN INTERACTIVE ROBOT USING AN AUGMENTED REALITY”, Proc. of 13th International Symposium on Robotics and Applications, World Automation Congress 2010, (CDROM), 2010.
- Yutaka Hiroi, Eiji Nakano, Takayuki Takahashi, Akinori Ito, Koji Kotani and Nobuo Takatsu,"A New Design Concept of Robotic Interface for the Improvement of User Familiarity", Proc. SPIE, vol.6042, no.604230, pp.1-4 , 2005.
[国内学会(2009年以降)]
- 木南有貴, 廣井富, 宮脇健三郎, 伊藤 彰則, "環境に応じた人とロボット間距離の変更手法の提案", 第26回計測自動制御学会システムインテグレーション部門(SI2025)講演論文 集 ,1B3-03, pp.499-501, 2025.
- 玉川陽, 廣井富, 宮脇健三郎, 伊藤 彰則, "鬼ごっこにおける鬼から逃げるロボットの経路計画の提案", 第43回日本ロボット学会学術講演論文集, 2H1-05, 2025.
- 木南有貴, 廣井富, 宮脇健三郎, 伊藤 彰則, "閉所への移動を考慮したLRFを用いた人の位置と向き情報を利用したロボットの移動手法の提案", ロボティクス・メカトロニクス講演会2025 講演論文集, 1P1-Q07,2025.
- 玉川陽, 廣井富, 宮脇健三郎, 伊藤 彰則, "道案内ロボットのためのLRFを用いた障害物回避手法の提案", ロボティクス・メカトロニクス講演会2025 講演論文集, 1P1-Q08,2025.
- 北本宙, 廣 井富, 宮脇健三郎, 伊藤 彰則,人追従ロボットのための3DLiDAR点群押しつぶし手法の押しつぶし範囲の検討,第25回計測自動制御学会システムインテグレーション部門(SI2024)講演論文 集,1B5-03, pp. 393-396, 2024.(優秀講演賞)
- 角田蓮, 廣 井富, 宮脇健三郎, 伊藤 彰則,道案内ロボットのための2個のLRFを用いた人検出手法の開発,第25回計測自動制御学会システムインテグレーション部門(SI2024)講演論文 集 ,1B5-04, pp.397-400, 2024.
- 玉川陽, 廣 井富, 宮脇健三郎, 伊藤 彰則,LRFを用いた障害物回避における多様なロボット形状への対応手法,第25回計測自動制御学会システムインテグレーション部門(SI2024)講演論文 集 ,1B5-05, pp.401-406, 2024.
- 中尾風駿, 廣 井富, 宮脇健三郎, 伊藤 彰則,鬼ごっこロボットのための展開収納可能な折りたたみ式アームの開発,第25回計測自動制御学会システムインテグレーション部門(SI2024)講演論文 集 ,1B5-06, p.407, 2024.
- 木南有貴, 廣 井富, 宮脇健三郎, 伊藤 彰則,LRFを用いた人の位置と向き情報を利用したロボットの移動手法の実装,第25回計測自動制御学会システムインテグレーション部門(SI2024)講演論文 集 ,1B5-07, p.408, 2024.
- 硲紅太,廣 井富, 鈴木陸人, 伊藤 彰則,遠隔からの回転台を有した2自由度レーザポインタ指示型学習支援ロボットの開発,ロボティクス・メカトロニクス講演会2024 講演論文集, 1P2-H02,2024.
- 鈴木陸人, 廣 井富, 伊藤 彰則,液晶タブレットへのペン描画によるペンプロッタ型学習支援ロボットの実現に向けて,第24回計測自動制御学会システムインテグレーション部門 (SI2023)講演論文集, 3G2-02, p. 3762, 2023.
- 角田蓮, 廣 井富, 宮脇健三郎, 伊藤 彰則,ロボットによる道案内のための全方向移動ロボットの開発,第24回計測自動制御学会システムインテグレーション部門(SI2023)講演論文集, 3G2-03, p. 3763, 2023.(優秀講演賞)
- 北本宙, 廣 井富, 宮脇健三郎, 伊藤 彰則,人追従ロボットへの3DLiDARの点群押しつぶし手法の実装,第24回計測自動制御学会システムインテグレーション部門(SI2023)講演論文 集, 3G2-04, p. 3764, 2023.
- 木南有貴, 廣井富, 宮脇健三郎, 伊藤 彰則,LRFを用いた人の位置と向き情報を利用したロボットの移動手法のシミュレーション実験,第24回計測自動制御学会システムインテグレーション部門(SI2023)講演論文集, 3G2-05, p. 3765, 2023.
- 若林広悦, 廣井富, 宮脇健三郎, 伊藤 彰則,人の手を引きながら先導する道案内ロボットへの間合い制御の実装,第24回計測自動制御学会システムインテグレーション部門(SI2023)講演論文集, 3G2-06, p. 3766, 2023.(優秀講演賞)
- 佐藤尚昭, 廣 井富, 北本宙, 宮脇健三郎,伊藤彰則, "鬼ごっこロボットのための複数のリュック型タッチデバイスの識別手法の提案", ロボティクス・メカトロニクス講演会2023 講演論文集, 1P1-F09,2023.
- 廣井富, 大継翔汰, 伊藤 彰則,コロナ禍における離れた場所からのペンプロッタ型学習支援ロボットの開発,第23回計測自動制御学会システムインテグレーション部門 (SI2022)講演論文集, 3A2-B15, p. 2029, 2022.
- 廣井富, 横山大輔, 伊藤 彰則,コロナ禍における離れた場所からのペンプロッタ型学習支援ロボットの開発,第23回計測自動制御学会システムインテグレーション部門 (SI2022)講演論文集, 3A2-B16, p. 2030, 2022.(優秀講演賞)
- 可西慶宇, 廣 井富, 宮脇健三郎, 伊藤 彰則,鬼ごっこロボットのための1 自由度アームを用いたタッチ動作の検討,第23回計測自動制御学会システムインテグレーション部門(SI2022)講演論文集, 3A2-B17, p. 2031, 2022.
- 若林広悦, 廣 井富, 宮脇健三郎, 伊藤 彰則, "距離誤差の少ない経路追従手法を実装した道案内ロボットの運用に向けた取り組み", 第40回日本ロボット学会学術講演論文集, 4D1-03, 2022.
- 若林広悦, 廣 井富, 宮脇健三郎, 伊藤 彰則, "道案内ロボットのための距離誤差の少ない経路追従手法の開発", ロボティクス・メカトロニクス講演会2022 講演論文集, 2A1-H02,2022.
- 星村駿, 廣 井富,可西慶宇, 宮脇健三郎, 伊藤彰則, "鬼ごっこロボットのためのリュックサック型タッチデバイスの試作-", ロボティクス・メカトロニクス講演会2022 講演論文集, 2A1-H03,2022.
- 若林広悦, 廣 井富, 宮脇健三郎, 伊藤 彰則,道案内ロボットのための距離誤差の少ない経路追従手法の提案,第22回計測自動制御学会システムインテグレーション部門(SI2021)講演論文 集, 1G1-03, pp. 825-830, 2021.(優秀講演賞)
- 廣井富, 瓜田竜一, 玉木一生, 若林広悦, 宮脇健三郎, 伊藤彰則,コロナ禍における離れた場所からの学習支援ロボットの開発,第39回日本ロボット学会学術講演論文集, 1C1-02, 2021.
- 可西慶宇, 廣 井富, 若林広悦, 宮脇健三郎, 伊藤彰則,鬼ごっこロボットのための複数人への追跡手法の提案,第39回日本ロボット学会学術講演論文集, 1G1-01, 2021.
- 可西慶宇, 廣 井富, 宮脇健三郎, 伊藤彰則, "人へのタッチを志向したロボットの人への接近手法の提案 -鬼ごっこロボットの開発-", ロボティクス・メカトロニクス講演会2021 講演論文集, 1P3-E02,2021.
- 御崎雄貴,廣 井富,伊藤彰則,Kinect による低演算量な腕振り動作の検出法とその評価,第21回計測自動制御学会システムインテグレーション部門(SI2020)講演論文集, 3E2-01, pp. 2722-2727, 2020.
- 廣井富, 朝倉大裕, 中田海地, 伊藤彰則, "人と並んだ状態で人追従可能なロボットに関する基礎的検討", ロボティクス・メカトロニクス講演会2020 講演論文集, 1A1-F02,2020.
- 池本瑚幸,廣 井富,伊藤彰則,2台のLRFを用いた人追跡手法の提案-鬼ごっこロボットの開発-,第20回計測自動制御学会システムインテ グレーション部門(SI2019)講演論文集, 3B3-12, pp. 2365-2367, 2019.
- 中田海地,朝倉 大裕, 廣 井富,伊藤彰則,人追従時における追従対象者と非追従対象者の切り分け手法の実装,第20回計測自動制御学会システムインテグ レーション部門(SI2019)講演論文集, 3B3-13, pp. 2368-2371, 2019.
- 中田海地,廣
井富,伊藤彰則,"人追従時における追従対象者と非追従対象者の切り分けに関する基礎的検討",ロボティクス・メカトロニクス
講演会2019 講演論文集 DVD-ROM, 1P1-L01,2019.
- 野阪百穂,廣
井富,伊藤彰則,"テレプレゼンスロボットのための操作者の顔提示機能の開発",ロボティクス・メカトロニクス講演会2019
講演論文集 DVD-ROM, 1P1-L02,2019.
- 宮内雄大,廣 井富,伊藤彰則,RGB-DカメラとLaser Range Finderを用いた障害物回避に関する基礎的検討,第19回計測自動制御学会システムインテグレーション部門(SI2018)講演論文集, 3A1-04, p. 2182, 2018.
- 中森裕子,廣 井富,田中翔吾, 伊藤彰則,「だるまさんが転んだ」の鬼役ロボットのためのタッチ機能の開発,第19回計測自動制御学会システムインテグレーション部門(SI2018)講 演論文集, 3D3-03, p. 3027, 2018.
- 野阪百穂,廣 井富,田中翔吾, 伊藤彰則,操作者の顔を再現するテレプレゼンスロボットの提案,第19回計測自動制御学会システムインテグレーション部門(SI2018)講演論文集, 3D3-04, p. 3028, 2018.
- 中森裕子,廣 井富,伊藤彰則,デモンストレーションを指向したロボットの原点復帰の提案 -「だるまさんが転んだ」を行うロボットの開発-,第36回日本ロボット学会学術講演論文集DVD, 2H2-05, 2018.
- 廣井富, 宮内雄大,伊藤彰則,正面から接近する歩行者に対するロボットの事前回避手法の開発,ロボティクス・メカトロニクス講演会2018 講演論文集 DVD-ROM, 1P2-G08, 2018.
- 廣井富, 小田垣成伸,伊藤彰則,"OpenPoseを用いた人の振り返り検出手法の開発―「だるまさんが転んだ」を行うロボットの開発―",ロボティクス・メカト ロニクス講演会2018 講演論文集 DVD-ROM, 1P2-G07, 2018.
- 中森裕子, 廣 井富, 伊藤彰則, LRF を用いた「だるまさんが転んだ」における「幅判定手法」の効果, ロボティクス・メカトロニクス講演会2017 講演論文集 DVD-ROM, 1P2-L06, 2017.
- 中森裕子, 廣 井富, LRFを用いた「だるまさんが転んだ」における人追従安定化に関する基礎的検討, 日本機械学会関西学生会学生員卒業研究発表講演会,16- p.21, 2017.
- 廣井富, 中森裕子, 森下康平, 伊藤彰則, 子どもと外遊びを行うテレプレゼンスロボットの提案, 第17回システムインテグレーション部門講演会(SI2016)講演論文集, pp. 1578-1579, 2016.
- 田中佑季,廣 井富,伊藤彰則,複数台の道案内ロボットのための人位置情報の引き継ぎ手法の提案,第34回日本ロボット学会学術講演論文集 DVD, 3G1-07, 2016.
- 津田剛志,廣 井富,伊藤彰則,RGB-Dセンサを用いた指差し認識に関する研究-位置誤差に関する一考察-,第34回日本ロボット学会学術 講演論文集DVD, 3G1-05, 2016.
- 田中佑季,廣 井富,伊藤彰則,複数台の手すりを移動する道案内ロボットによる人位置情報の引き継ぎ手法の実装,第18回日本感性工学会大会 予稿集, F22, 2016.
- 廣井富, 前田彰大, 田中佑季, 伊藤彰則, 拡張現実感を用いた恐怖感低減手法に関する検討, ロボティクス・メカトロニクス講演会2016 講演論文集 DVD-ROM, 2P1-11b1, 2016.
- 廣井富, 前田彰大, 田中佑季, 松丸隆文, 伊藤彰則, 移動ロボット接近時における動作予告を用いた恐怖感低減に関する検討, ロボティクス・メカトロニクス講演会2016 講演論文集 DVD-ROM, 2P1-11b2, 2016.
- 廣井富, 森奨平, 藤原祐磨, 伊藤彰則, 拡張現実感を用いた生活支援ロボットの恐怖感低減手法の評価-ロボットサイズに関する実験-, ロボティクス・メカトロニクス講演会2015 講演論文集 DVD-ROM, 2A2-H03, 2015.
- 廣井富, 森奨平, 藤原祐磨, 伊藤彰則, 拡張現実感を用いた生活支援ロボットの恐怖感低減手法の評価-ロボットの色に関する実験-, ロボティクス・メカトロニクス講演会2015 講演論文集 DVD-ROM, 2A2-H04, 2015年.
- 廣井富, 坂井奎亮, 立田裕記, 伊藤彰則, ロボットとの「だるまさんがころんだ」の提案, ロボティクス・メカトロニクス講演会2015 講演論文集 DVD-ROM, 2A2-H05, 2015.
- 田中佑季, 廣 井富, 藤原祐磨, 伊藤彰則, 人の少し前を移動するコミュニケーションロボットの評価-手すり上を移動するコミュニケーションロボットの開発-, ロボティクス・メカトロニクス講演会2015 講演論文集 DVD-ROM, 2A2-H06, 2015年.
- 田中佑季, 廣 井富, 人の少し前を移動するコミュニケーションロボットの提案,日本機械学会関西学生会学生員卒業研究発表講演会, no. 17, p. 10, 2015. (Best Presentation Awards)
- 鈴木直人,廣 井富,藤原祐磨,千葉祐弥,能勢隆,伊藤彰則,英会話学習システムの複数回使用時における学習者の交替潜時の変化に関する検 討,日本音響学会春季講演論文集,pp. 189-190,2015.
- 鈴木直人,廣 井富,藤原祐磨,千葉祐弥,能勢隆,伊藤彰則,英会話学習システムにおける応答タイミング練習方法の有効性の検証,情報処理学 会研究報告,vol. 2014-SLP-105,no. 13,6 pages,2015.
- 坂井奎亮, 廣 井富, 二上啓大, 藤原祐磨, 伊藤彰則,人追従と移動軌跡の記憶が可能な台車「Carry PM2」の開発, 第15回計測自動制御学会システムインテグレーション部門講演会(SI2014)講演論文集,pp. 2158-2159,2014.
- 藤原祐磨, 廣
井富, 鈴木直人, 伊藤彰則,
手すり上を移動するコミュニケーションロボットの開発―伸びる手を用いた道案内の評価―, 第32回日本ロボット学会学術講演論文集DVD,
3P2-04, 2014.
- 坂井奎亮, 廣 井富, 伊藤彰則 , LRFによる人追従を考慮した障害物回避手法の提案,第32回日本ロボット学会学術講演論文集DVD, 2D2-06, 2014.
- 鈴木直人,廣 井富,藤原祐磨,千葉祐弥,能勢隆,伊藤彰則,英会話学習システムにおけるCGキャラクタの効果と学習者の発話タイミング制御 のための付加表現に関する検討,日本音響学会秋季講演論文集,pp. 53-54,2014.
- 廣井富, 坂井奎亮, 二上啓大, 藤原祐磨, 伊藤彰則, 日常生活支援移動ロボットASAHI2013の開発, ロボティクス・メカトロニクス講演会 2014 講演論文集DVD-ROM,2A1-F05,2014年.
- 藤原祐磨, 廣 井富, 川崎成人, 黒田尚孝, 鈴木直人, 伊藤彰則, 手すり上を移動するコミュニケーションロボットの開発―伸びる手を用いた道案内の提案―, ロボティクス・メカトロニクス講演会 2014 講演論文集DVD-ROM,2A1-F06,2014年.
- 二上啓大, 廣 井富, 黒田尚孝, 鈴木直人, 伊藤彰則, 指差しと音声対話併用による床面上の物体回収手法の提案, ロボティクス・メカトロニクス講演会 2014 講演論文集DVD-ROM,2A1-F07,2014年.
- 坂井 奎亮, 廣 井富, 伊藤彰則, LRFを用いた人追従時の移動軌跡の記録と軌道追従に関する基礎的検討, ロボティクス・メカトロニクス講演会 2014 講演論文集DVD-ROM,2A1-F08,2014.
- 坂井奎亮, 廣 井富, LRFを用いた人追従と移動軌跡の記録の両立に関する基礎的検討, 日本機械学会関西学生会学生員卒業研究発表講演会,no.17, p.15, 2014年3月17日
- 鈴木直人,廣 井富, 藤原祐磨, 黒田尚孝, 戸塚典子, 千葉祐弥, 伊藤彰則, AR キャラクタとの英会話練習時における交替潜時のタイムプレッシャーによる制御, 情報処理学会研究報告, vol. 2013-SLP-99, no. 9, 6 pages, 2013年.
- 鈴木直人,廣 井富, 藤原祐磨, 黒田尚孝, 戸塚典子, 千葉祐弥, 伊藤彰則, AR キャラクタを用いた音声対話による英会話学習システムの検討-タイムプレッシャー導入の効果-, 第18回日本バーチャルリアリティ学会大会論文集, pp.258-261, 2013年.
- 廣井富,& nbsp;黒田尚孝, 藤原祐磨, 戸塚典子, 伊藤彰則, 手すりを移動するコミュニケーションロボット―道案内方法の比較―, 第31回日本ロボット学会学術講演論文集DVD, 1G3-02, 2013年.
- 黒田尚孝, 廣 井富, 伊藤彰則,ロボットアバタを用いた指差し行為の移動ロボットへの実装―人間による指差し認識の調査 ―,第31回日本ロボット学会学術講演論文集DVD, 1I1-01, 2013年.
- 黒田尚孝, 廣 井富, 三宅真司, 伊藤彰則,ロボットアバタを用いた指差し行為の移動ロボットへの実装,第30回日本ロボット学会学術講演論文集DVD, 1H2-3, 2012年.
- 廣井富, 内田裕二, 西村駿宏. 中山貴之, 黒田尚孝, 三宅真司, 戸塚典子, 伊藤彰則, 手すりを移動するコミュニケーションロボット―全体コンセプト―, ヒューマンインタフェースシンポジウム2012論文集, 1223S, pp. 101-102, 2012.
- 黒田尚孝, 廣 井富, 三宅真司, 伊藤彰則, ロボットアバタを用いた指差し行為の実現-ロボットアバタへの実装-, 第14回感性工学会大会予稿集CD-ROM,A4-7,2012.
- 中山貴之, 廣 井富, 黒田尚孝, 三宅真司, 伊藤彰則, ロボットの動作によって人間の発話開始時間を制御できるか?, 情報処理学会研究報告, vol. 2012-SLP-92, no. 5, 6 pages, 2012.
- 廣井富, 黒田尚孝, 内藤圭祐, 髙田晶太, 松井一馬, 井上駿, 林和孝, 中山貴之, 松中翔平, 伊藤彰則, 日常生活支援移動ロボットASAHI の開発-全体構想とハードウェア構成-, ロボティクス・メカトロニクス講演会 2012 講演論文集DVD-ROM,2A1-P03,2012.
- 黒田尚孝, 廣 井富, 松井一馬, 三宅真司, 伊藤彰則, ロボットアバタを用いた指差し行為の実現-基本コンセプトと予備実験-, ロボティクス・メカトロニクス講演会 2012 講演論文集DVD-ROM,2A1-P04,2012.
- 黒田尚孝,廣 井富,ロボットアバタを用いた指差し行為に関する基礎的検討,日本機械学会関西学生会学生員卒業研究発表講演会,no. 20, p. 18,2012.
- 内藤圭祐,廣 井富,レーザレンジファインダを用いた人追跡の基礎的検討,日本機械学会関西学生会学生員卒業研究発表講演会,no. 20, p. 17,2012.
- 中山貴之,廣 井富,黒田尚孝,三宅真司,伊藤彰則,ロボットの高さが対話のしやすさに及ぼす影響に関する予備的検討,第12回計測自動制御 学会システムインテグレーション部門講演会(SI2011)講演論文集DVD,pp.193-194,2011.
- 中山貴之, 廣 井富, 伊藤彰則,移動ロボット減速時におけるロボットアバタを用いた動作予告法の実装と評価,第29回日本ロボット学会学術講演論文集DVD, 3G2-5, 2011.
- 廣井富, 伊藤彰則, ロボットアバタを用いた日常生活支援ロボットの親しみ感の向上-非ヒューマノイドロボット型ロボットへの適用-, ロボティクス・メカトロニクス講演会 2011 講演論文集CDROM,2P2-Q07,2011.
- 廣井富, 篠原達也,兼次一喜,岩本昂,中山貴之, 伊藤彰則, 日常生活支援移動ロボットGoyaneの開発 –高さ変更可能な機構の提案-, ロボティクス・メカトロニクス講演会 2011 講演論文集CDROM,2P2-Q08,2011.
- 中山貴之, 廣 井富, 移動ロボット減速時におけるロボットアバタを用いた動作予告法の検討,日本機械学会関西学生会学生員卒業研究発表講演会,no. 18, p. 17,2011.
- 廣井富, 伊藤彰則, ロボットの主観評価における身体と拡張現実感, 信学技報, vol. 110, no. 459, HCS2010-62, pp. 27-28,2011.
- 去来川勇樹,廣 井富,榊洋祐,二神龍平,中山貴之,伊藤彰則, 拡張現実感を用いた日常生活支援移動ロボットへの位置の指示方法の提案, 第31回バイオメカニズム学会学術講演会予稿集,pp. 159-160,2010.
- 廣井富, 後藤基允, 山本祐三, 山根佑介, 稲田遥一, 大原達哉, 木村昭太, 久野修平, 伊藤彰則, 日常生活支援移動ロボットGoyaneの開発, ロボティクス・メカトロニクス講演会 2010 講演論文集CDROM,2A2-A21,2010.
- 廣井富, 大原達哉, 木村昭太, 久野修平, 伊藤彰則, 日常生活支援移動ロボットのためのロボットアバタを用いた動作予告の比較, ロボティクス・メカトロニクス講演会 2010 講演論文集CDROM,2A2-A22,2010.
- 廣井富, 伊藤彰則,生活支援ロボットの実用化を目指して, 信学技報, vol. 109, no. 457, HCS2009-70, pp. 21-22,2010.
- 久野修平, 廣 井富, 拡張現実感を用いたロボットアバタの頭部形状の検討,日本機械学会関西学生会学生員卒業研究発表講演会,no. 20, p. 14,2010.
- 廣井富,
後藤基允,山本祐三,大原達哉,木村昭太,伊藤彰則,
日常生活支援型移動ロボットのためのロボットアバタを用いた動作予告の実装,日本ロボット学会第27回学術講演会予稿集CDROM, 3C3-08,2009.
[招待講演]
- 日本バーチャルリアリティ学会 テレイグジスタンス研究委員会,第1回テレイグジスタンス研究会「ロボットアバタと日常生活支援 ロボット」,慶応義塾大学,(2012年12月14日)
- 日本感性工学会 感性工房部会,感性ロボティクスワークショップ(第2回)「感性ロボティクス ロボット研究者の感性は?」,中 央大学,(2007年2月26日)
[最終成果報告会]
- 東北大学21世紀COEプログラム「言語・認知総合科学戦略研究教育拠点」,ロボットアバタを用いたユーザ親和性向上に関する研 究,(2007年2月28日)
[科研費]
- 基盤研究(C),「生活支援ロボットにおける動的接触インタラクションの高度化の研究」(2025年4月1日~2028年3 月31日)
- 基盤研究(C),「動的接触インタラクションが可能な子どもと遊ぶ生活支援ロボットの実現」(2020年4月1日~2023年3 月31日)
- 基盤研究(C),「子供との動的インタラクションが可能なロボットの実現」(2016年4月1日~2019年3月31日)
- 若手研究(B),「ロボットアバタを用いた生活支援ロボットの親和性向上に関する研究」(2014年4月1日~2016年3月 31日)
- 挑戦的萌芽研究,「エージェントとの対話に基づく英語学習システムの開発」(2012年4月1日~2015年3月31日)